
Synopsis: Deferred camera work; Autopilot repairs yield some unexpected benefits; and Inadequate flows cause holding troubles.
Suck it up, buttercup: The weather lately has been hot and humid, with constant cloud cover and the perpetual chance for thunderstorms. It hasn’t stopped raining in forever. I’ve been in kind of a funk lately; lacking the motivation to eat right, exercise, and study for the new jet. This morning I reminded myself that I have nothing to complain about. It was time to get myself moving and launch on a mental health day. When it finally stopped raining for a few minutes, I decided to ride the Harley over to the airport to do some flying.
I made an effort to make good on a promise to give friends an airplane ride. I wasn’t able to connect with anyone last minute, so I continued solo. I enjoy going over to the hangar and being at the airport in general. It buoyed my mood and focused my thoughts. Today I would exercise the two onboard weather resources (ADS-B and XM), capture video footage I could use in this blog and on YouTube, and practice approach automation flows while flying approaches at Delaware Coastal (KGED). After 2 or 3 approaches, I’d land there and top off the tanks for Tuesdays trip to central PA.
The plan to capture additional video for this blog fell apart fairly quickly. I had taken all the camera equipment home in an attempt to organize and update it. I even ordered several new mounts for the two cameras that would expand how I could use them. All that equipment was in my car at the moment, however, so I grabbed what I needed and headed out. In transferring the camera equipment from my car to my motorcycle, I’d left behind key components of the mounting system. There’d be no video today.
Delaware Coastal Approaches: Both engines started up nicely. I taxied out for Runway 1 this morning, where I’d hold for maybe 10 minutes awaiting release. I didn’t want to launch VFR with 1800′ ceilings as the idea of blasting along with slower airplanes squeezed under a cloud layer did not appeal.

The time came and I launched into the cloud layer talking to Philly. The ride was surprisingly smooth in the thick air you find flying low in summer. It was hot and humid in the cockpit, but I knew that I’d have to climb to at least 6000′ to get some cool air going today.
When the hot weather first arrived, I actually thought I had a problem with the ventilation system, or that it hadn’t been put back together correctly. I couldn’t seem to get the airplane to cool down. Later, it dawned on me that the majority of my flying since the return had been down low – around 3,000′. I hadn’t been traveling away from home much, and therefore hadn’t been climbing out of the heat. All better now – it was 22o C at 6000′ today, or 71o F. Nice and comfortable.
I was also above the cloud tops at 6000′ and could see where the buildups were. Were I to have been traveling today, I’d have climbed to 10000′ and used onboard weather to circumnavigate the building cumulus. For today’s flight down to the south end of Delaware and back there’d be no problem other than the cloud bumps and occasional rain. I don’t expect ceilings lower than 1500′.
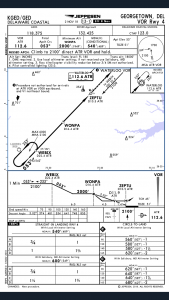
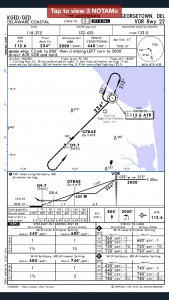
I had about four hours of fuel onboard, and followed procedure to work off the auxiliary tanks as soon as I had leveled off. In contact with Dover approach, I told them about the plan I had envisioned. The KGED VOR22to a low approach, followed by the KGED VOR4 to another low approach. After that, I’d do a KGED GPS22 to a full stop and get fuel. It would be back and forth across the airport several times until I finally landed.
There was a possibility that Dover would be too busy to handle these approaches, or there’d be a conflict and I’d have to do them VFR suddenly. If that ended up being the case, I knew that the VOR4 as published would take me into Salisbury’s Class Delta. I planned to be at 3000′ for that approach to prepare for that, but Dover must have had the same thought.
 Once cleared for the VOR 22 approach, they asked if I could accept a modified missed approach, given what I wanted to do. ‘Absolutely’, I said, and then suggested 3000′ direct WEBIX. Dover countered with runway heading to 3000′. They ended up clearing me to WEBIX after they reestablished contact.
Once cleared for the VOR 22 approach, they asked if I could accept a modified missed approach, given what I wanted to do. ‘Absolutely’, I said, and then suggested 3000′ direct WEBIX. Dover countered with runway heading to 3000′. They ended up clearing me to WEBIX after they reestablished contact.
All good. Even though I retained my IFR clearance, flying the approach at 3000′ would keeping me clear of any scud runners or VFR traffic down under the clouds. I’d use the 3 to 1 rule to manage my descent from 3 instead of 2, and it’d work out fine.
First complication. Since the plan had been for me to fly automated approached and practice the button pushing I needed to be doing (my flows), I had intended to let the autopilot make all the turns. Dover cleared me ‘straight in’ from WATERLOO, however, which gave me my first challenge.
Cleared for the VOR 22 approach from ATR with a straight in approach meant telling the Garmin 530W that it didn’t have to do the hold. Nope. Can’t go to the flight plan page and modify the approach that way, so I’d have to activate the leg from ATR to OTBAE instead. The VOR is the FAF, so that meant no vertical guidance since the autopilot won’t sequence unless you are established on the final approach course prior to the FAF.
I was only a few miles from ATR when the clearance came in, approaching from the north, so I went to heading mode and did the turn and the descent manually. This is precisely what I’m practicing – translating approach clearance nuances into 1967 automation. If I needed the added safety margin of the autopilot, I’d have refused the straight in clearance and done a turn in the hold. That would have enabled turn anticipation and a coupled descent.
Now for the missed – a slight left turn to align with the runway and then a climb to 3000′. The VOR 4 is next, and includes my next challenge. I properly re-engage the autopilot and select heading mode. The climb is done manually until intercept because I do a better job than the autopilot in managing the climb. Everything appears to be working fine and I’m cleared direct WEBIX, maintain 3000′ until established, cleared for the VOR4 approach into Delaware Coastal.
I make it to WEBIX just fine, and look forward to letting the autopilot do the turn for me. I pick up a deviation in my expected path – the airplane doesn’t seem to be making the turn. Something is wrong, the bank angle is far too shallow and I switch to heading mode to fly it around. The airplane is turning a little, but still not quickly enough. I am behind the airplane and heading outside of the protected area on the approach – not good. I manually get back on course and all this took longer than either ATC or I expected. Conflicting traffic now required Dover to cancel my approach clearance for spacing, and have me do another turn in the hold at the last minute.

Since the GPS had already sequenced beyond the hold, I re-selected the hold and again tried heading mode to get the turn done. Nothing seemed to be working, and then I realized what I had done wrong. Way back there on the missed approach from VOR 22, I had neglected to return the Mode Selector to HDG from LOC. That meant GPSS roll steering will not work, and this is the result. My flows had failed me and my scan had also. The GPSS mode will not work with that selector mode in LOC, but it needs to be set in that mode for the glideslope coupler to work.
The learning is that I need to ensure that I include the mode 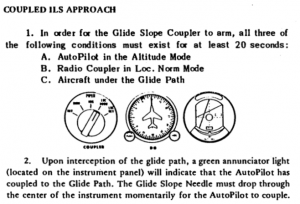 selector in my flows and my scan. On an inbound coupled approach, I typically disconnect the autopilot at 500′ agl by resetting all four switches on the Altimatic IIIB control head to OFF. What I need to do is to move the mode selector to HDG at the same time. Both of my VOR 4 holds were messed up as a result of this misstep.
selector in my flows and my scan. On an inbound coupled approach, I typically disconnect the autopilot at 500′ agl by resetting all four switches on the Altimatic IIIB control head to OFF. What I need to do is to move the mode selector to HDG at the same time. Both of my VOR 4 holds were messed up as a result of this misstep.
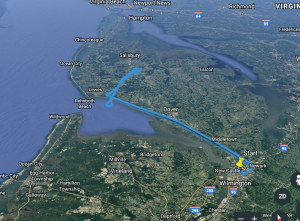 Most of the flight went very well today. I included the image below showing the entire flight path. It was hot and humid on the ground, but cool and smooth in small buildups most of the flight. I did have a bit of trouble getting the left engine going after the refueling, but the hot start approach eventually worked. Next time it’s this hot I’ll try a start without prime and with the mixture full first.
Most of the flight went very well today. I included the image below showing the entire flight path. It was hot and humid on the ground, but cool and smooth in small buildups most of the flight. I did have a bit of trouble getting the left engine going after the refueling, but the hot start approach eventually worked. Next time it’s this hot I’ll try a start without prime and with the mixture full first.
Autopilot Improvements: I was pleasantly surprised to note a change in autopilot behavior since the system was overhauled in February/March of this year. It used to be that the autopilot could not function below 130 mph, and that had been true since I’d owned the airplane. Get below that airspeed and the pitch would oscillate and then you’d know you were getting slow. I compensated by flying automated approaches at 130 mph, and manual ones at 120. Note that the flap speed is 125, so I would not use flaps on a coupled precision approach as a result.
Today I find out that the autopilot now operates quite nicely below 130, so I flew one coupled approaches with vertical guidance at 120mph and flaps, and another at 110mph with 2/3 flaps. I now have more options should I decide to include flaps in my approaches. An interesting twist to explore on the next flight.
Fly safe!
Frank